Now that you know what the IGVC is about, I'll go into some detail about our high-level approach. The challenge provides some obvious requirements:
- A reference frame relative to earth to navigate to waypoints; GPS provides position and compass provides heading
- Line detection to stay within lanes; a color camera suffices
- Obstacle detection; a 2D rangefinder is the is logical choice
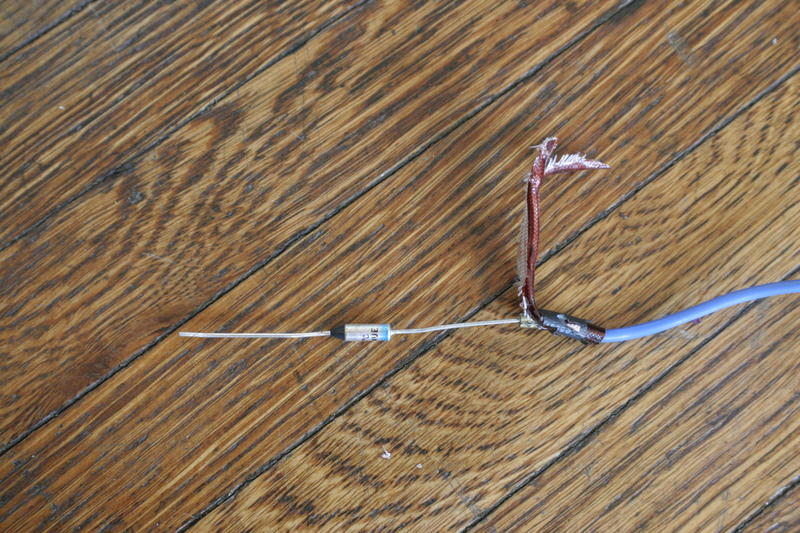
- Precise measurement of velocity; provided by encoders, accelerometers, and gyros
I'll go through each requirement in a bit of depth, describe typical solutions, and design constraints.
An absolute reference tells the robot exactly where in the world it is. GPS and compass provide that data. Unfortunately, GPS is only accurate to about 6', so it isn't useful for local navigation. A 2' difference in position is the difference in hitting an obstacle and avoiding it. The GPS is useful for providing long-range direction: the goal is 60' southwest.
Most teams improve their GPS accuracy with exotic antennas and exact correction services (the speed of light varies through the atmosphere, distorting timestamps and GPS location. A corrective signal provides the difference in true and measured time-of-flight, improving accuracy.) Although these units offer remarkable resolution (within 6"), they are prohibitively expensive ($20,000).
Lafayette's team, named Team Terminus, will use an inexpensive GPS receiver, accurate to roughly 6'. It costs less than $100. (Cost, by the way, will be a persistent theme. Most IGVC robots run $20,000 to $80,000; Lafayette budgeted Terminus $6000.)

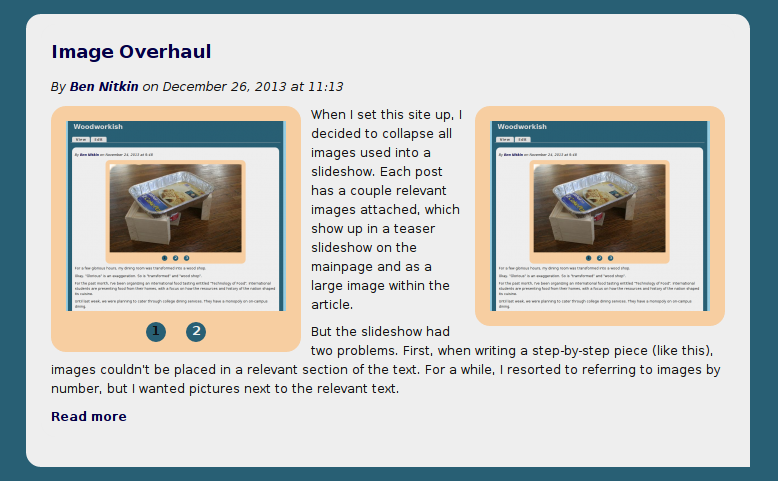
 When I set this site up, I decided to collapse all images used into a slideshow. Each post has a couple relevant images attached, which show up in a teaser slideshow on the mainpage and as a large image within the article.
When I set this site up, I decided to collapse all images used into a slideshow. Each post has a couple relevant images attached, which show up in a teaser slideshow on the mainpage and as a large image within the article.